¿QUÉ SON LOS MOTORES BRUSHED Y BRUSHLESS?
Los motores son una de las partes esenciales para que nuestro drone pueda volar. En los cuadricópteros contaremos con 4 motores, equidistantes en forma de X. Debemos tener en cuenta que no giran los 4 motores en el mismo sentido, si no que lo hacen por parejas, es decir, 2 motores (emparejados en diagonal) girarán en sentido horario o CW (Clockwerk) y los otros 2 girarán en sentido anti-horario o CCW (Counter Clockwerk). Estos motores pueden tener diferentes características, como por ejemplo el tamaño, la potencia o las revoluciones. Pero la diferenciación más importante divide a los motores en: brushed (con escobillas) o brushless (sin escobillas).
BRUSHED (CON ESCOBILLAS)
Estos motores son los que encontraremos en todos los Micro Whoop, además de en todos los drones baratos y de pequeño tamaño del mercado. Su característica principal es la existencia en su interior de escobillas, que rozan con su rotor, a diferencia de los brushless. Debido a este rozamiento, este tipo de motores se desgastan mucho más rápido y suelen tener características muy similares entre los distintos modelos, pero a cambio son mucho más baratos que los brushless. Su punto fuerte no es la potencia, pero aún así podemos llegar a encontrar motores brushed realmente rápidos para nuestros Micro Whoop. La potencia de este tipo de motores se traduce en tamaño del mismo, cuanto más grande es el motor, más potencia tiene.
Los motores brushed funcionan con corriente continua, por lo que en vez de variadores (ESC) llevan unos transistores que regulan la potencia de los mismos en función de las órdenes que enviemos desde la emisora.
Es importante que nos fijemos en el tamaño a la hora de comprar nuestros motores brushed, ya que encontraremos medidas como por ejemplo: 6x15mm, esta hace referencia al diámetro y a la longitud del motor, además, también podemos encontrar otra medida llamada shaft que tiene que ver con el diámetro del émbolo del motor donde colocamos las hélices. Esta medida, shaft, debe ser igual tanto en tus motores como en tus hélices, por ejemplo, 0,8mm.
BRUSHLESS (SIN ESCOBILLAS)
Su principal característica, como dice su propio nombre, es la falta de escobillas. Esto hace que no exista rozamiento con su rotor y que este tipo de motores tenga mayor duración, en principio, que los brushed. Y digo en principio, porque los motores brushless son los utilizados para drones de carreras, por lo que nadie te libra de estrellarlo y que se estropeen. Esta falta de escobillas y su consecuente mayor duración y menor necesidad de mantenimiento, hacen a estos motores mucho más caros que los brushed, pero esto no quiere decir que hagamos la comparación brushless-bueno y brushed-malo, hay que saber observar nuestras necesidades y elegir en consecuencia.
Estos motores funcionan con corriente alterna, lo que quiere decir que necesitaremos unos variadores (ESC) para poder gestionar su potencia. Los variadores se encargarán de recibir las órdenes que demos desde la emisora y de gestionar la potencia de los motores según esas órdenes.
Respecto al tamaño y potencia, cabe destacar que cuántos más kv,el motor será más pequeño y nervioso necesitando hélices también más pequeñas, de lo contrario se volverá muy difícil de controlar. Cuántos menos kv, el motor será más grande y se adaptará mejor a hélices también más grandes.
CONCLUSIONES
Normalmente la mayoría de drones por encima de los 150 euros, los drones de carreras y los drones con bastante potencia, usarán motores brushless. Aunque como has leído arriba, debes ajustar tu equipo a tus necesidades y entender bien las características de cada componente. Por ejemplo, para los Micro Whoop o Tiny Whoop, no tiene sentido usar motores sin escobillas, ya que la potencia que necesitamos para movernos por sitios tan pequeños y delimitados nos la pueden dar unos motores brushed, costando así, las reparaciones y recambios muchísimo menos que si fuesen brushless.


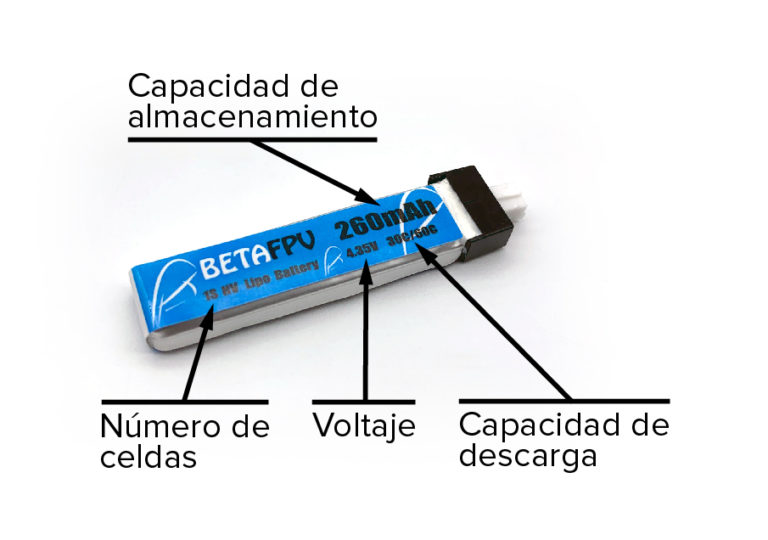 mAh o miliamperios a la hora: es la capacidad de almacenamiento del que dispone la batería. Su capacidad va unida a su tamaño, de tal forma que cuantos más miliamperios, mayor será su tamaño y, por lo tanto, su peso. Esta es una de las razones por las que en los micro drones, las baterías de una celda serán suficientes.
mAh o miliamperios a la hora: es la capacidad de almacenamiento del que dispone la batería. Su capacidad va unida a su tamaño, de tal forma que cuantos más miliamperios, mayor será su tamaño y, por lo tanto, su peso. Esta es una de las razones por las que en los micro drones, las baterías de una celda serán suficientes.